
Laboratoire de commande et de robotique
Établi à l'ÉTS, le Laboratoire de commande et de robotique (CoRo) regroupe une trentaine de membres qui travaillent à concevoir de nouveaux robots ou à améliorer des robots industriels offerts sur le marché en développant, par exemple, des accessoires ou des méthodes pour les utiliser de façon optimale.
Les activités du CoRo sont axées sur la recherche appliquée en collaboration avec l’industrie et différents centres de recherche.
Notre laboratoire est doté d'équipements à la fine pointe de la technologie. Il comporte plusieurs robots industriels, y compris des robots collaboratifs, et une gamme complète d’appareils de métrologie : laser tracker FARO, bras FARO, ballbar Renishaw, système d'interférométrie Renishaw, etc.


Nos principaux axes de recherche
Dans l’industrie, la plupart des utilisateurs de robots manipulateurs se contentent de l’excellente répétabilité de leurs mouvements. Aujourd’hui, l’effecteur d’un robot industriel peut reproduire une pose déjà enseignée avec une erreur de position inférieure à 0,1 mm. Cependant, dans certaines applications, les poses à atteindre sont calculées plutôt qu’enseignées, ce qui implique qu’une précision absolue est également exigée.
L’étalonnage constitue la façon la moins coûteuse d’améliorer la précision absolue des robots. S’il existe différentes solutions commerciales pour l’étalonnage de robots basées sur l’utilisation d’appareils de métrologie, les moins chères coûtent néanmoins plusieurs dizaines de milliers de dollars. De plus, ces solutions ne satisfont pas les besoins de l’ensemble des utilisateurs pour diverses raisons (cellule robotique exigüe, absence de budget pour acheter un appareil de mesure tridimensionnelle, etc.).
Le secteur de l’aérospatiale est probablement le plus exigeant en matière de robotique de précision et, paradoxalement, le moins bien servi. Ce secteur est particulièrement présent et actif dans la grande région de Montréal où plusieurs entreprises internationales utilisent des robots industriels pour des tâches de précision, dont Pratt & Whitney, GE Aviation, Messier-Dowty, L3-MAS, Bombardier Aéronautique et Fives Liné Machines.
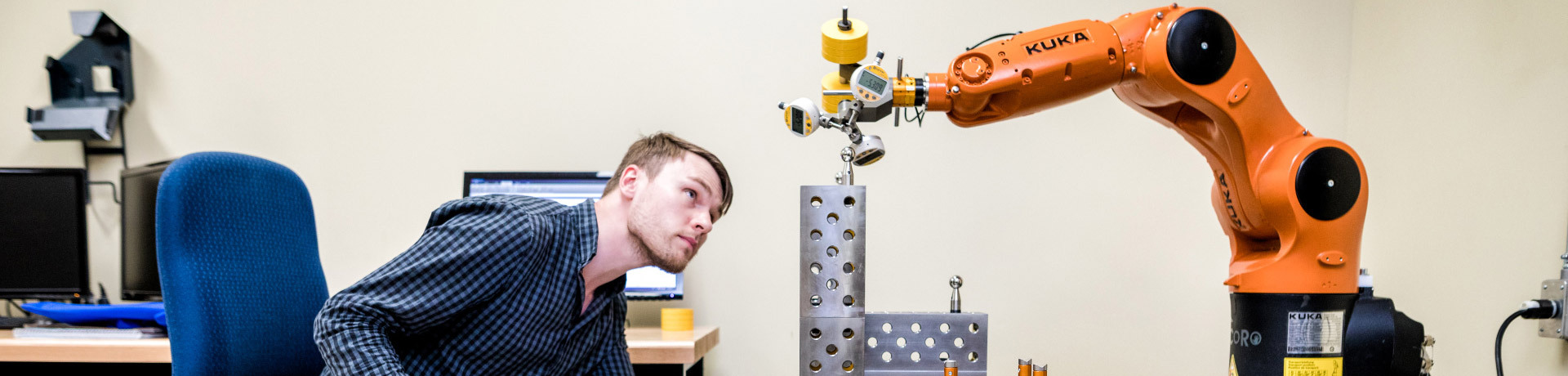
Les projets d’étalonnage de robots consistent essentiellement en l’utilisation d’un appareil de métrologie et d’artefacts mécaniques pour augmenter la précision absolue d’un robot. Ce travail de recherche exige une excellente base en mathématiques et fait appel à la programmation d’algorithmes d’optimisation, à la conception mécanique, à la métrologie de base, à la programmation de robots, et à l’utilisation de diverses API. C’est un travail qui implique beaucoup d’expérimentation.
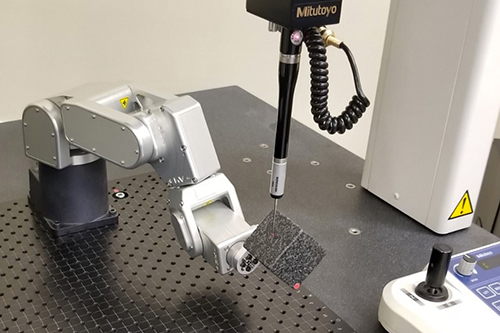
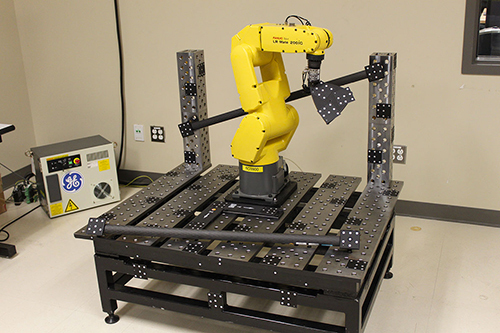
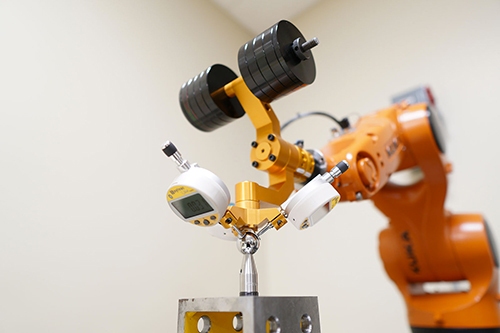
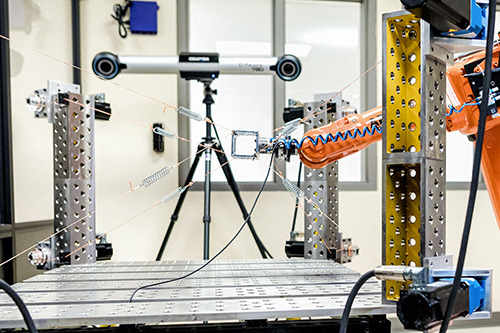
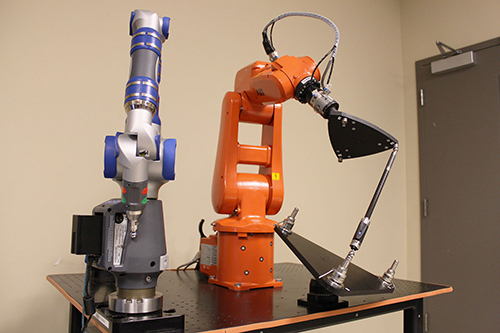
L’équipe du Prof. Bonev a développé plusieurs méthodes innovatrices d’étalonnage de robots sériels et parallèles, basées par exemple sur l’utilisation d’un laser de poursuite (laser tracker) ou d’une machine de mesure de coordonnées (CMM), d'un palpeur et divers artefacts d’étalonnage, d’un « ballbar » télescopique de Renishaw, d’appareil de mesure à double caméra (C-Track de Creaform), d’un nouveau dispositif de mesure tridimensionnel (TriCal), et même d’un robot à câbles muni d’un capteur de forces et de torques.
Plusieurs de ces méthodes ont été implantées en industrie, chez Messier-Dowty ou GE Aviation par exemple. L’appareil TriCal a été vendu à quelques fabricants de robots, dont Universal Robots.
Exemples de publications :
- C. Icli, O. Stepanenko et I. Bonev, “New method and portable measurement device for the calibration of industrial robots”, Sensors, vol. 20, 5919, 2020.
- K. Kamali et I.A. Bonev, “Optimal experiment design for elasto-geometrical calibration of industrial robots”, IEEE/ASME Transactions on Mechatronics, vol. 24, no. 6, pages 2733–2744, 2019.
- A. Nubiola et I.A. Bonev, “Absolute robot calibration with a single telescoping ballbar”, Precision Engineering, vol. 38, no. 3, pages 472–480, 2014.
Outre les bras manipulateurs, ces robots industriels omniprésents de type sériel, il existe un autre type de manipulateurs : les robots parallèles. Un robot sériel se compose essentiellement d'une série de segments reliés par des articulations motorisées, alors que dans un robot parallèle, il y a plusieurs séries de segments et la plupart des articulations ne sont pas motorisées.
Les robots parallèles peuvent être plus rapides, plus rigides ou plus précis que les robots sériels. Une grande partie des robots de transfert rapide sont des robots parallèles ainsi que la quasi-totalité des simulateurs de mouvement (simulateurs de vols, de conduite, etc.). Plusieurs des dispositifs de positionnement précis dans le domaine de l'optique sont également des robots parallèles.
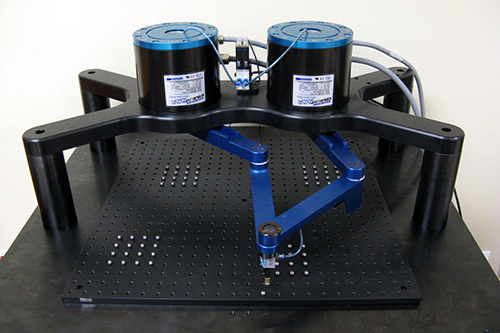
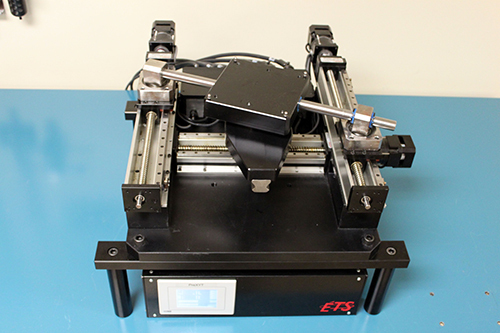
L’équipe du Prof. Bonev travaille sur l’analyse cinématique de robots parallèles, ainsi que sur la conception et le développement de nouvelles architectures parallèles. Plusieurs prototypes ont été fabriqués au laboratoire et sont toujours fonctionnels. En collaboration avec d’autres collègues de l’ÉTS, le Prof. Bonev travaille aussi sur la commande de ces robots.
Exemples de publications :
- E. Cherchelanov et I.A. Bonev, “A novel three-legged 6-DOF parallel robot with simple kinematics”, Transactions of the Canadian Society for Mechanical Engineering, 2020.
- O. Stepanenko, I.A. Bonev, et D. Zlatanov, “A new 4-DOF fully-parallel robot with decoupled rotation for 5-axis micromachining applications”, Journal of Mechanisms and Robotics, vol. 11, no. 3, 2019.
- N. Rakotomanga et I.A. Bonev, “A 3-RPR parallel mechanism with singularities that are self-motions”, Journal of Mechanisms and Robotics, vol. 2, no. 3, 2010.
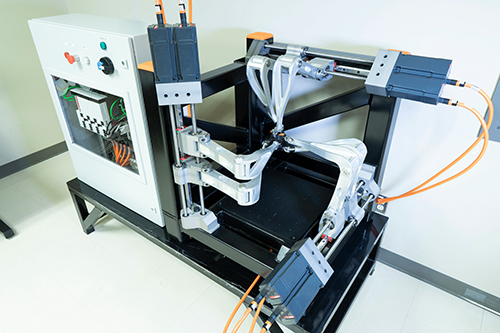
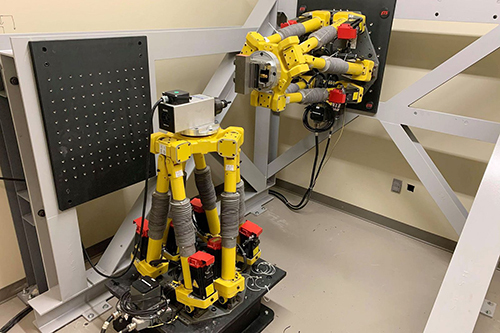
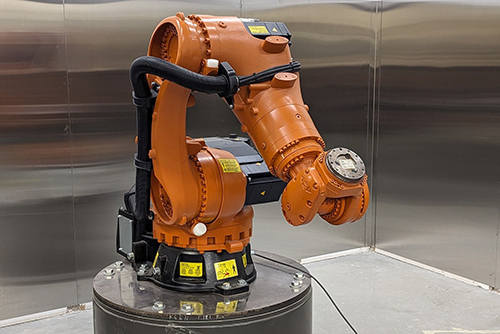
Les robots industriels sont parfois utilisés pour l’enlèvement de matière (perçage, finition, etc.) sur les pièces en métal ou en composite. Le Prof. Ilian Bonev collabore avec des professeurs du Département de génie mécanique à l’ÉTS pour travailler sur une cellule d’usinage composée de deux hexapodes de FANUC, ainsi que sur une autre composée d’un robot KUKA à six axes combiné avec une table rotative.
Puisque les robots industriels à six axes ont un espace de travail limité, ils sont souvent utilisés en tandem avec une table rotative ou un guide linéaire, ou carrément avec un autre robot, ce qui amène de la redondance. Il y a également de plus en plus de bras robotiques à sept axes, donc redondants, tels les robots YuMi utilisés dans le cours de robotique industrielle du Prof. Ilian Bonev. Enfin, lorsqu’un robot à six axes est utilisé pour l’usinage, une tâche qui ne nécessite que cinq degrés de liberté, on a également une redondance à gérer.
L’équipe du Prof. Bonev oeuvre sur l’analyse cinématique de ces robots redondants (espace de travail, singularité), ainsi que sur la gestion optimale de la redondance.

Exemples de publications :
- Pham, M.-N., Champliaud, H., Liu, Z., et Bonev, I.A., “Parameterized finite element modeling and experimental modal testing for vibration analysis of an industrial hexapod for machining", Mechanism and Machine Theory, vol. 167, January, 2022.
- M. FarzanehKaloorazi, I.A. Bonev, et L. Birglen, “Simultaneous path placement and trajectory planning optimization for a redundant coordinated robotic workcell”, Mechanism and Machine Theory, vol. 130, pages 346–362, 2018.
Fréquemment, les robots et les processus industriels impliquent des tâches complexes qui nécessitent une coordination précise et un contrôle efficace. Au laboratoire CoRo, nous nous concentrons donc également sur l'étude et le développement d'algorithmes de commande avancés pour garantir que les robots et les systèmes automatisés atteignent leurs objectifs de manière fiable et efficiente.
Par exemple, l'un des aspects clés de la commande des robots est l'asservissement des actionneurs qui les composent. Que ce soit pour des robots à morphologie sérielle ou parallèle, il est essentiel de concevoir des algorithmes de commande adaptés aux tâches qui leur sont confiées. Nos chercheurs se penchent ainsi sur l'étude de différentes architectures de commande, de stratégies de contrôle et même sur l’emploi d’algorithmes d’intelligence artificielle afin de permettre aux systèmes robotisés d’accomplir leurs fonctions de façon sécuritaire, précise et sûre.
Notre laboratoire ne se limite pas seulement à la commande des robots. Nous nous intéressons également au contrôle des processus industriels dans leur ensemble. Les processus industriels peuvent impliquer des systèmes complexes, tels que des chaînes de production automatisées, des chaînes de montage ou des systèmes de contrôle de la qualité. Nous travaillons sur des techniques de contrôle avancées, telles que la commande prédictive, la commande optimale et la commande adaptative, pour optimiser les performances, réduire les coûts de production et améliorer la qualité des produits.
En collaborant étroitement avec l'industrie, notre laboratoire vise à transférer les connaissances et les technologies développées vers des applications pratiques.
Les systèmes automatisés présents dans l'industrie adoptent de plus en plus un mode de production agile, favorisant une production davantage axée sur la demande. Ce paradigme de production, caractérisé par de plus petits lots de biens produits mais une plus grande variété, accroît la complexité des tâches confiées aux robots. En effet, au lieu d'effectuer un petit ensemble de tâches de manière répétitive, comme c'était le cas autrefois, les robots d'aujourd'hui sont appelés à exécuter des opérations plus complexes et variées. De plus, avec l'émergence des robots collaboratifs, qui travaillent désormais à proximité des humains, de nouveaux besoins de robotisation ont émergé dans de nouveaux secteurs industriels.
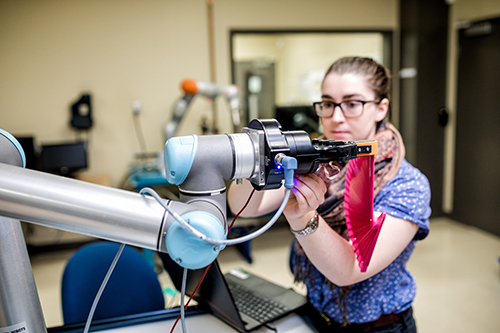
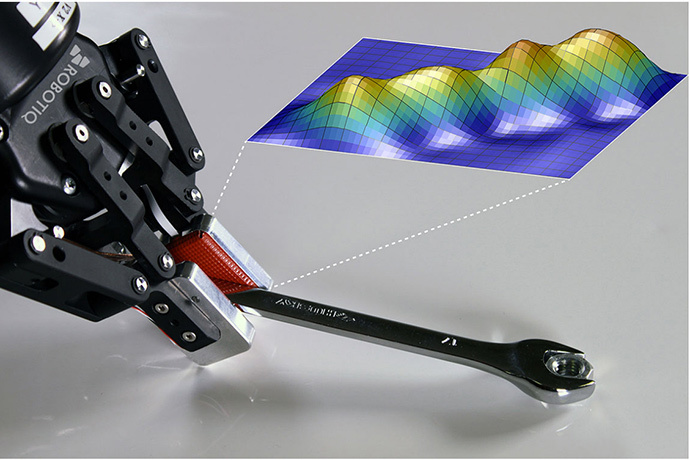
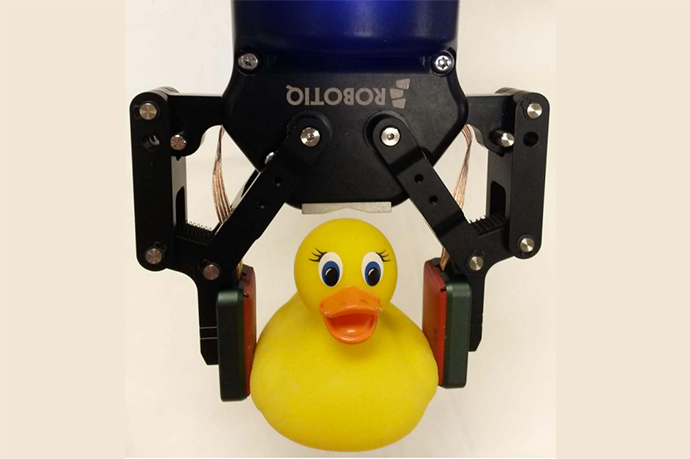
Afin de répondre aux exigences de la robotisation de ces processus plus complexes et variés, les robots devront être dotés de meilleures capacités de perception et d'algorithmes de contrôle adaptés. La vision artificielle permet de répondre à une partie des besoins sensoriels, mais elle ne constitue pas à elle seule une solution complète au problème de la perception, en particulier en ce qui concerne la manipulation robotique et plus spécifiquement la dextérité des robots. C'est pourquoi certains de nos chercheurs, tels que les professeurs Vincent Duchaine et Jean-Philippe Roberge, travaillent activement sur le développement de nouvelles technologies de perception tactile, dans le but de doter les futurs robots d'un sens du toucher.
Les travaux de recherche menés au laboratoire concernent particulièrement le développement de nouveaux capteurs tactiles robustes et performants, ainsi que l'élaboration d'algorithmes permettant d'interpréter leurs données afin de bonifier les habiletés de manipulation et la dextérité des robots. L'expertise développée au sein du laboratoire est principalement axée sur les capteurs tactiles capacitifs et les capteurs optiques basés sur la vision. De nombreux travaux ont été publiés, notamment sur les applications de ces capteurs dans de réels scénarios de manipulation avancés. Cela comprend, par exemple, la détection du glissement, l'évaluation de la qualité d'une prise, la reconnaissance automatique d'objets basée uniquement sur le toucher, la détection d'événements dynamiques, la classification des mouvements d'objets lorsqu'ils sont touchés accidentellement par un bras manipulateur, et bien d'autres encore.

Exemples de publications :
- R. Thomasson, E. Roberge, M. R. Cutkosky et J.-P. Roberge, "Going In Blind: Object Motion Classification using Distributed Tactile Sensing for Safe Reaching in Clutter", 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 2022, pp. 1440-1446.
- J.-P. Roberge, W. Ruotolo, V. Duchaine et M. Cutkosky, "Improving Industrial Grippers With Adhesion-Controlled Friction", in IEEE Robotics and Automation Letters, vol. 3, no. 2, pp. 104-1048, April 2018.
- T.-H.-L. Le, A. Maslyczyk, J.-P. Roberge et V. Duchaine, "A highly sensitive multimodal capacitive tactile sensor", 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 2017, pp. 407-412.
Notre laboratoire s'intéresse à la création d'interfaces haptiques portables permettant de restituer certaines sensations tactiles aux personnes amputées de la main. Au-delà de la mécanique simpliste qui limite la capacité de préhension des prothèses actuelles, l'incapacité de ces prothèses à percevoir et à transmettre des informations sensorielles extéroceptives et proprioceptives rend leur contrôle beaucoup plus difficile. Ce manque d'informations a des répercussions négatives sur l'habileté des amputés à effectuer de nombreuses tâches quotidiennes et nécessite une surveillance visuelle constante de la prothèse. Dans ce contexte, notre laboratoire se consacre à la recherche et à la conception d'interfaces tactiles avancées, visant à ajouter des sensations sensorielles aux écrans tactiles existants. Nous explorons des technologies et des méthodes innovantes pour créer des interfaces haptiques réalistes et immersives, offrant aux utilisateurs la possibilité de ressentir des textures, des vibrations et des forces lorsqu'ils interagissent avec des écrans tactiles. Ces interfaces tactiles enrichies peuvent être appliquées à divers domaines, tels que la réalité virtuelle, la simulation de procédures médicales, la formation, le design industriel, pour ne nommer que ceux-là.
Exemples de publications :
- Vincent Lévesque, Louise Oram, Karon MacLean, Andy Cockburn, Nicholas D. Marchuk, Dan Johnson, J. Edward Colgate, et Michael A. Peshkin. 2011. Enhancing physicality in touch interaction with programmable friction. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems (CHI'11). Association for Computing Machinery, New York, NY, USA, 2481–2490.
- M. R. Motamedi, J.-B. Chossat, J.-P. Roberge et V. Duchaine, "Haptic feedback for improved robotic arm control during simple grasp, slippage, and contact detection tasks", 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 2016, pp. 4894-4900.
L'interaction physique entre les humains et les robots est un domaine relativement récent de la robotique qui vise à permettre aux robots et aux humains de partager de manière synergique le même espace de travail. Cette évolution représente une étape naturelle vers une robotique plus avancée, se situant entre la robotique industrielle actuelle et les futurs robots humanoïdes polyvalents. Cette coexistence a le potentiel d'avoir un impact considérable dans plusieurs domaines de la vie quotidienne, tels que la réhabilitation, les dispositifs d'assistance robotique ou la chirurgie assistée. Outre ces domaines d'application, ce concept a de plus en plus d’impacts dans le domaine manufacturier. Une synergie efficace entre l'humain et le robot peut y être réalisée en combinant les incroyables capacités humaines de raisonnement et d'adaptation aux environnements non structurés avec la puissance et l’efficacité inépuisables d'un robot.
Les professeurs de notre laboratoire se concentrent particulièrement sur le défi de donner à ces robots la capacité d'interagir de manière intuitive avec les humains en développant des algorithmes de commande adaptés. Cela comprend des recherches sur la commande par impédance variable et l'élaboration de stratégies de réaction (réflexes) basées sur les données de moyens de perception avancés.


L'équipe du CoRo





Nous trouver
Laboratoire de commande et de robotique (CoRo)
Département de génie des systèmes
École de technologie supérieure
1100, rue Notre-Dame Ouest
Montréal (Québec) H3C 1K3
La recherche à l'ÉTS
L’ÉTS offre un environnement idéal pour penser et créer ce qui pourrait changer le monde de demain.