
Control and Robotics Laboratory
The Control and Robotics Laboratory (CoRo) at ÉTS comprises more than 30 members who work together to design new robots or improve industrial robots that are currently on the market by developing accessories and methods for optimizing their use, among other approaches. Working in collaboration with industry and various research centres, CoRo’s activities focus on applied research.
The Lab is equipped with advanced technological equipment, including a number of industrial robots, some of which are collaborative, and a wide range of metrology instruments: FARO laser tracker, FARO arms, Renishaw ballbar, Renishaw interferometry system, etc.


Main areas of research
Most users of robot manipulators in industrial settings are satisfied with the excellent repeatability of their movements. These days, an industrial robot’s effector can reproduce a previously taught pose with a position error of less than 0.1 mm. However, the poses to be attained in some applications are computed rather than taught, which means that absolute accuracy is required.
Calibration is the most cost-effective way to improve the absolute accuracy of robots. Although there are various commercial solutions available for calibrating robots using metrology devices, the least expensive of these still cost tens of thousands of dollars. Furthermore, these solutions do not meet the needs of all users for a variety of reasons (lack of space in robotic cells, lack of funds for purchasing three-dimensional measurement devices, etc.).
In terms of precision robotics, the aerospace sector is probably the most demanding, and paradoxically, the least well served. This sector is extremely well represented and active in the Greater Montreal Area, with a number of international companies using industrial robots for precision tasks, including Pratt & Whitney, GE Aviation, Messier-Dowty, L-3 MAS, Bombardier Aerospace and Fives Liné Machines.
Robot calibration projects essentially entail the use of measurement devices and mechanical artefacts to enhance the absolute accuracy of robots. This type of research work demands a very strong background in mathematics, and requires the programming of optimization algorithms, mechanical design, basic metrology, robot programming and the use of various APIs. It also involves a great deal of experimentation.
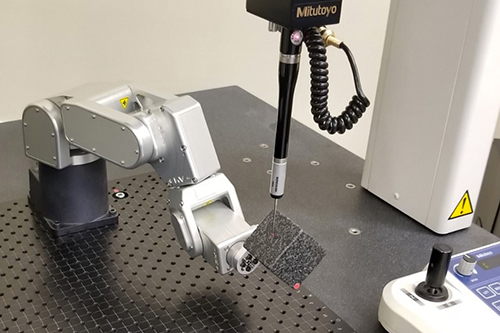
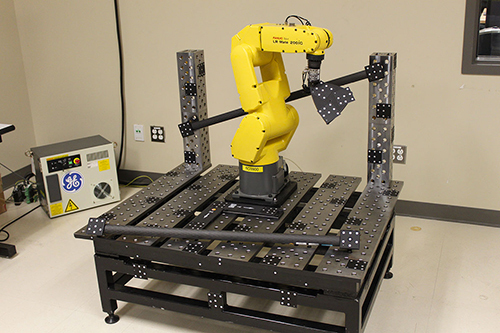
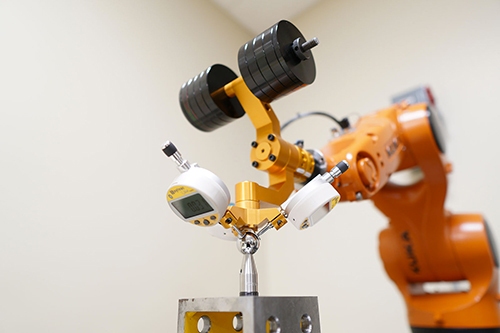
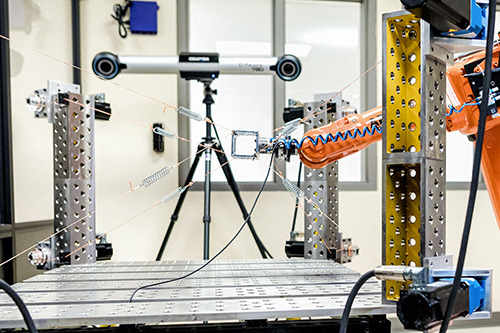
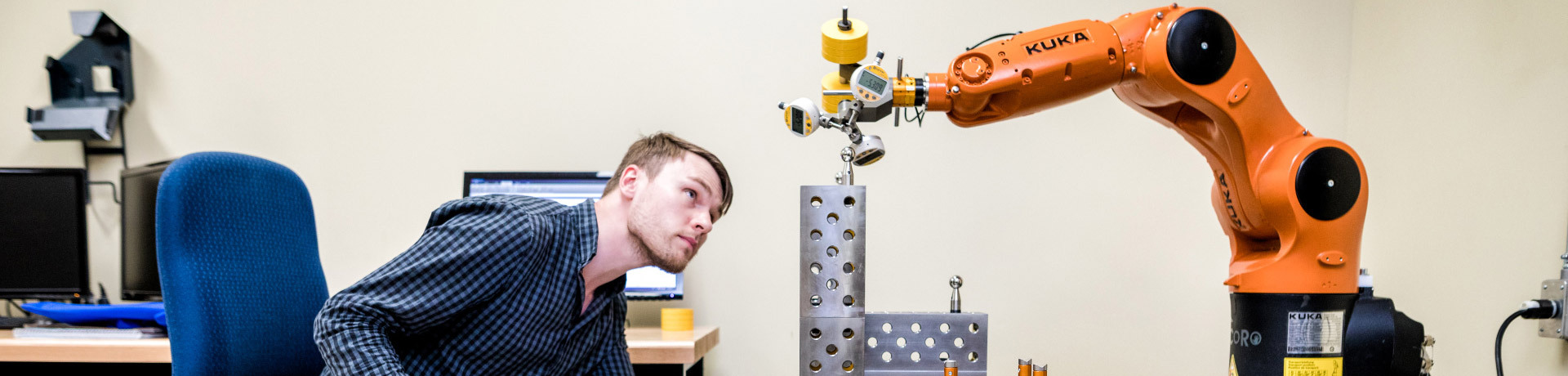
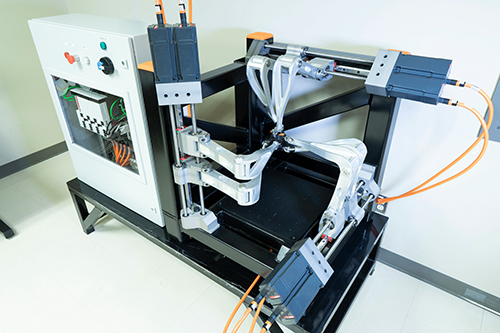
Professor Bonev’s team has developed a number of innovative methods for calibrating serial and parallel robots, based on the use of a laser tracker or a coordinate measuring machine (CMM), a probe and various calibration artefacts, a telescopic Renishaw ballbar, a Creaform C-Track dual-camera device, a new three-dimensional measuring device (TriCal) and even a cable-driven robot and a load sensor, among others.
Many of these methods have been implemented in industrial settings by Messier-Dowty or GE Aviation, for example, and the TriCal device has been sold to a number of robot manufacturers, including Universal Robots.
Publications:
- C. Icli, O. Stepanenko, and I. Bonev, “New method and portable measurement device for the calibration of industrial robots”, Sensors, vol. 20, 5919, 2020.
- K. Kamali and I.A. Bonev, “Optimal experiment design for elasto-geometrical calibration of industrial robots”, IEEE/ASME Transactions on Mechatronics, vol. 24, no. 6, pp. 2733–2744, 2019.
- A. Nubiola and I.A. Bonev, “Absolute robot calibration with a single telescoping ballbar”, Precision Engineering, vol. 38, no. 3, pp. 472–480, 2014.
In addition to the ubiquitous serial industrial robots with manipulator arms, there are other types of manipulators available, namely parallel robots. A serial robot essentially comprises a series of links connected by motorized joints, whereas a parallel robot comprises multiple series of links, with most of the joints not being motorized.
Parallel robots can be faster, more rigid and/or more accurate than serial robots. A high percentage of pick-and-place robots are parallel robots, as are the vast majority of motion simulators (flight and driving simulators, etc.). In addition, many of the precise positioning devices used in the field of optics are parallel robots.
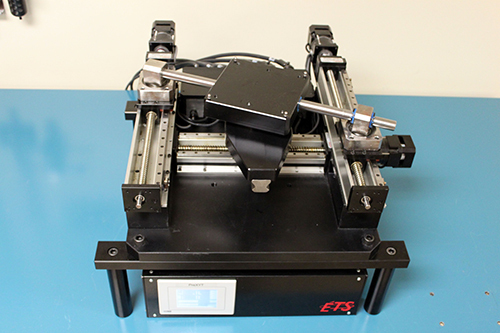
Professor Bonev and his team are working on the kinematic analysis of parallel robots, along with the design and development of new parallel architectures. The CoRo Laboratory has fabricated a number of functional prototypes. Professor Bonev also works in collaboration with other colleagues from ÉTS on the control of these robots.
Publications:
- E. Cherchelanov and I.A. Bonev, “A novel three-legged 6-DOF parallel robot with simple kinematics”, Transactions of the Canadian Society for Mechanical Engineering, 2020.
- O. Stepanenko, I.A. Bonev, and D. Zlatanov, “A new 4-DOF fully-parallel robot with decoupled rotation for 5-axis micromachining applications”, Journal of Mechanisms and Robotics, vol. 11, no. 3, 2019.
- N. Rakotomanga and I.A. Bonev, “A 3-RPR parallel mechanism with singularities that are self-motions”, Journal of Mechanisms and Robotics, vol. 2, no. 3, 2010.
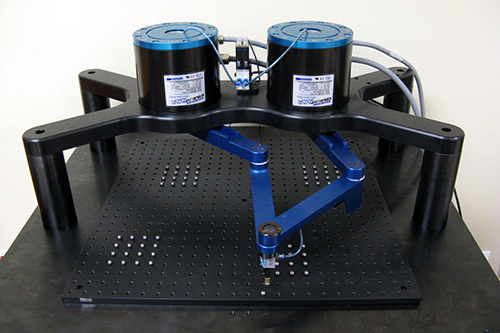
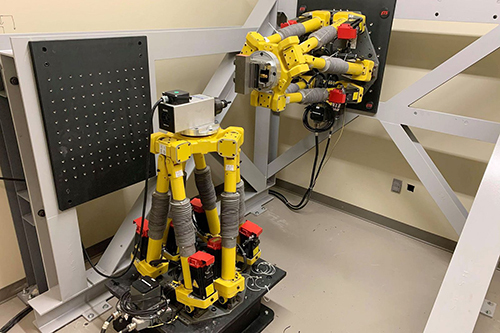
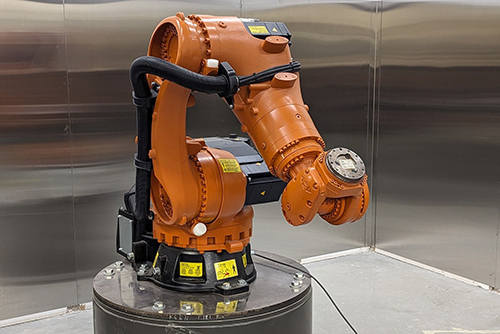
Industrial robots are sometimes used in the machining (drilling, finishing, etc.) of metal or composite parts. Professor Ilian Bonev is working with professors from the Mechanical Engineering Department at ÉTS to develop a machining cell that includes two FANUC hexapods, along with another that includes a six-axis KUKA robot with a rotary table.
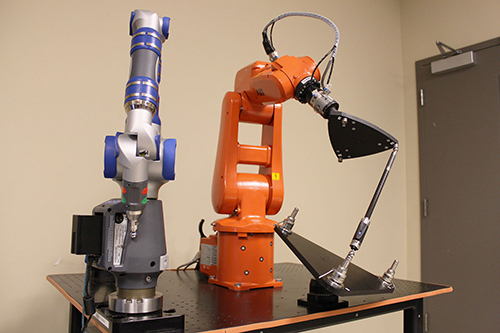
Six-axis industrial robots have a limited working space, and therefore, they are often used in tandem with a rotary table or linear guide, or simply with another robot, which leads to redundancy. Seven-axis robotic arms, which are inherently redundant, are also becoming more prevalent, including the YuMi robots used in Professor Bonev’s Industrial Robotics course. Redundancy must also be managed when a six-axis robot is used for machining, which is a task that requires only five degrees of freedom.
The kinematic analysis of these redundant robots (working space, singularity) and the optimal management of redundancy represent additional areas of research for Professor Bonev and his team.

Publications:
- Pham, M.-N., Champliaud, H., Liu, Z., and Bonev, I.A., “Parameterized finite element modeling and experimental modal testing for vibration analysis of an industrial hexapod for machining", Mechanism and Machine Theory, vol. 167, January, 2022.
- M. FarzanehKaloorazi, I.A. Bonev, and L. Birglen, “Simultaneous path placement and trajectory planning optimization for a redundant coordinated robotic workcell”, Mechanism and Machine Theory, vol. 130, pages 346–362, 2018.
Robots and industrial processes often involve complex tasks that require precise coordination and effective control. Toward this end, the CoRo Lab focuses on both the analysis and development of advanced control algorithms to ensure that the robots and automated systems attain their objectives reliably and efficiently.
For example, one of the key aspects of robot control is the servoing of component actuators. In the case of both serial and parallel robots, it is essential to develop control algorithms that are adapted to the tasks at hand. Our researchers also focus on studying the various control architectures, control strategies and even the use of artificial intelligence algorithms to enable robotized systems to accomplish their functions safely, accurately and securely.
The CoRo Lab does not focus exclusively on the control of robots. We are interested in the control of industrial processes as a whole. These processes may involve complex systems, such as automated production lines, assembly lines and quality control systems. We work on advanced control techniques, including predictive control, optimal control and adaptive control, to optimize performance, reduce production costs and improve the quality of products.
Working closely with industry, the goal is to transfer the knowledge and technologies developed at our Lab for practical applications.
The adoption of agile production modes for automated systems used in industry is becoming more and more prevalent, which leads to production that is more responsive to demand. This production paradigm, characterized by smaller batches of produced goods but greater variety, increases the complexity of the tasks entrusted to robots. As such, instead of repetitively carrying out a small set of tasks, as was the case in the past, robots are now called upon to execute more complex and varied operations. In addition, with the emergence of collaborative robots that work in close proximity to humans, new sets of needs related to robotization have arisen in new industrial sectors.
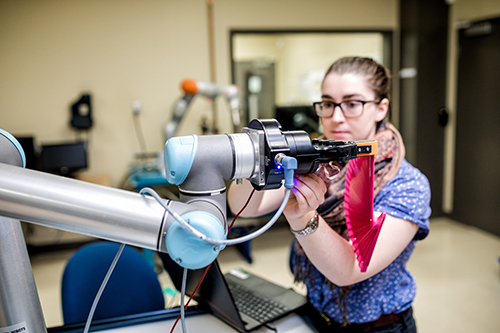
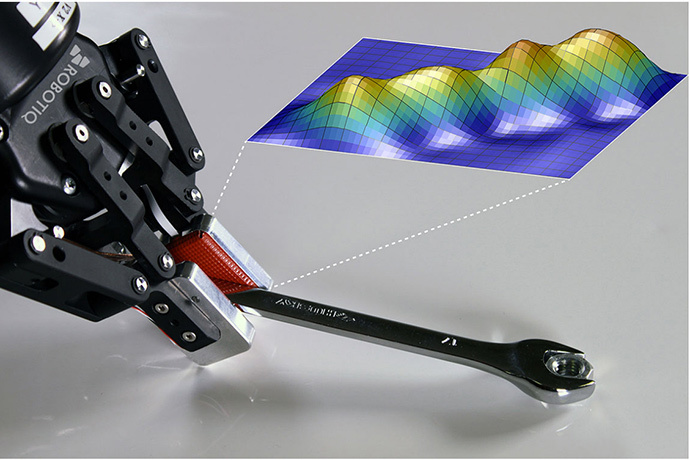
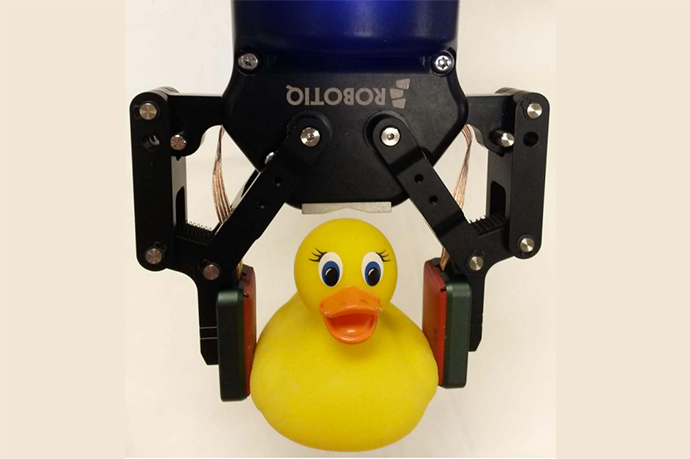
In order to meet the robotization requirements of these more complex and varied processes, robots must be equipped with enhanced perception capabilities and adapted control algorithms. Artificial vision helps to meet some of the sensorial requirements, but it does not represent a complete solution to the problem of perception in and of itself, especially with respect to robotic manipulation, and more specifically, robot dexterity. In light of this, some of our researchers, including Professor Vincent Duchaine and Professor Jean-Philippe Roberge, are actively pursuing the development of new tactile perception technologies with a view to equipping future robots with a sense of touch.
The research work that is being conducted at CoRo focuses primarily on the development of new tactile sensors that are more robust and effective, along with the creation of algorithms for interpreting the data, with a view to enhancing the manipulation capabilities and dexterity of robots. The expertise that is being developed at the Lab focuses mainly on capacitive tactile sensors and vision-based optical sensors. A number of articles have been published, especially addressing the application of these sensors in real advanced manipulation scenarios, including slip detection, assessing grip quality, automatic object recognition based solely on touch, dynamic event detection, classification of the movement of objects that are accidentally contacted by a manipulator arm and many other aspects.

Publications:
- R. Thomasson, E. Roberge, M. R. Cutkosky and J.-P. Roberge, "Going In Blind: Object Motion Classification using Distributed Tactile Sensing for Safe Reaching in Clutter", 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 2022, pp. 1440-1446.
- J.-P. Roberge, W. Ruotolo, V. Duchaine and M. Cutkosky, "Improving Industrial Grippers With Adhesion-Controlled Friction", in IEEE Robotics and Automation Letters, vol. 3, no. 2, pp. 104-1048, April 2018.
- T.-H.-L. Le, A. Maslyczyk, J.-P. Roberge and V. Duchaine, "A highly sensitive multimodal capacitive tactile sensor", 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 2017, pp. 407-412.
Our Lab is currently working to create portable haptic interfaces that will enable hand amputees to regain some sense of touch. Beyond the simplified mechanics that limit the gripping ability of current prosthetic devices, the inability of such devices to perceive and transmit exteroceptive and proprioceptive information makes them much more difficult to control. This lack of information has a negative impact on amputees in terms of their ability to perform certain daily tasks, and requires constant monitoring of the prosthetic devices. In light of this, the CoRo Lab is committed to researching and designing advanced tactile interfaces aimed at adding sensorial sensations to existing touch screens. We are studying innovative technologies and methods for creating realistic and immersive haptic interfaces that offer users the possibility of feeling textures, vibrations and forces when interacting with touch screens. These enhanced tactile interfaces may find applications in a variety of fields, including virtual reality, simulation of medical procedures, training and industrial design, to name but a few.
Publications:
- Vincent Lévesque, Louise Oram, Karon MacLean, Andy Cockburn, Nicholas D. Marchuk, Dan Johnson, J. Edward Colgate, and Michael A. Peshkin. 2011. Enhancing physicality in touch interaction with programmable friction. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems (CHI'11). Association for Computing Machinery, New York, NY, USA, 2481–2490.
- M. R. Motamedi, J.-B. Chossat, J.-P. Roberge and V. Duchaine, "Haptic feedback for improved robotic arm control during simple grasp, slippage, and contact detection tasks", 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 2016, pp. 4894-4900.
Physical interaction between humans and robots is a relatively young field in robotics, with the goal of enabling humans and robots to share synergy within a common workspace. This evolution represents a natural step toward more advanced robotics, and lies halfway between today's industrial robots and the versatile humanoid robots of tomorrow. This type of coexistence has the potential to significantly impact a number of areas related to daily life, including rehabilitation, robot-assisted devices and assisted surgery. In addition to these fields of application, this concept is having an increasingly significant impact on the manufacturing sector. Effective synergy between humans and robots can be brought to fruition by combining the incredible capacity of human beings to reason and adapt to unstructured environments with the inexhaustible strength of robots.
Professors at CoRo are focusing specifically on the challenge of providing these robots with the capacity to interact with humans intuitively through the creation of adapted control algorithms. This requires research into variable impedance control and the development of reaction strategies (reflexes) based on data from advanced perception methods.


The CoRo team





Contact us
Control and Robotics Laboratory
Systems Engineering Department
École de technologie supérieure
1100, Notre-Dame Street West
Montréal (Québec) H3C 1K3
Research at ÉTS
ÉTS provides an ideal environment for conceiving and creating the ideas that will shape the world of the future.